写在开头 最近读论文读累了总想找点其他事情做,知乎上推荐了一本《算法图解》,比较适合之前没有接触过算法的人入门,内容很少,读起来很轻松,茶余饭后读的话大概读2天就能读完。以下是这本书的读书笔记和里面一些算法的实现。
第一章:算法简介 仅当列表是有序的时候,二分查找才管用。时间复杂度为O(logn)
1 2 3 4 5 6 7 8 9 10 11 12 13 def binary_search (in_list, num ): left = 0 right = len(in_list)-1 while left <= right: mid = (left+right)//2 if num == in_list[mid]: return mid elif num < in_list[mid]: right = mid - 1 else : left = mid + 1 return None
第二章:选择排序
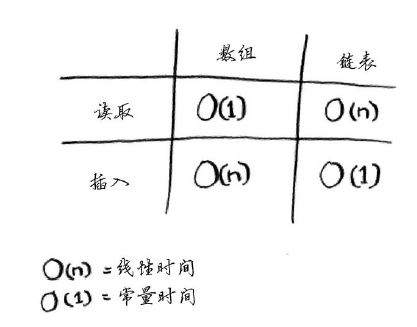
需要同时读取所有元素时,链表的效率很高,但如果需要跳跃时,链表的效率很低。
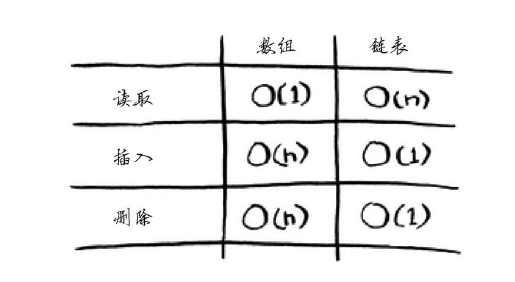
数组和链表常见操作运行时间:
需要指出的是,仅当能够立即访问要删除的元素时,删除操作的运行时间才为O(1)。
链表只支持顺序访问,而数组不仅支持顺序访问,还支持随机访问。
选择排序时间复杂度O($n^2$)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 def sel_small (arr ): small = arr[0 ] small_idx = 0 for i in range(1 , len(arr)): if arr[i] < small: small_idx = i return small_idx def selection_sort (arr ): result = [] while arr: small_idx = sel_small(arr) result.append(arr.pop(small_idx)) return result
第三章:递归 递归只是让解决方案更清晰,并没有性能上的提升。如果使用循环,程序的性能可能更高;如果使用递归,程序可能更容易理解。
每个递归函数都有两部分:基线条件(base case)和递归条件(recursive case)。基线条件 指函数不再调用自己,从而避免形成无限循环,递归条件 指函数调用自己。
所有函数的调用都直接入栈。
1 2 3 4 5 6 def fact (n ): if n == 1 : return 1 else : return n*fact(n-1 )
第四章 快速排序 使用分治算法 (D&C,divide & conquer)需要包含的步骤:
分土地问题
找出基线条件,这种条件必须尽可能简单
不断将问题分解(或者说缩小规模),直到符合基线条件
D&C并非可用于解决问题的算法,而是一种解决问题的思路。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 def sum_arr (arr ):if not arr: return 0 elif len(arr) == 1 : return arr[0 ] else : return arr[0 ] + sum_arr(arr[1 :]) def count_arr (arr ):if not arr: return 0 else : return 1 +count_arr(arr[1 :])
1 2 3 4 5 6 7 8 9 10 11 12 13 14 def quick_sort (arr ): if len(arr) <= 1 : return arr if len(arr) == 2 : if arr[0 ] <= arr[1 ]: return arr else : return arr[::-1 ] else : pivot = arr[0 ] less = [i for i in arr[1 :] if i < pivot] greater = [i for i in arr[1 :] if i >= pivot] return quick_sort(less)+[pivot]+quick_sort(greater)
第五章:散列表(哈希表)
冲突 :给两个键分配的位置相同。处理冲突的方式很多,最简单的办法如下:如果两个键映射到了同一个位置,就在这个位置存储一个链表。
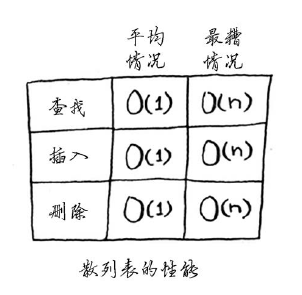
散列表的性能:
在最糟情况下,散列表所有操作的运行时间都为O(n)——线性时间。
为了避免冲突,要求:
较低的填装因子。
良好的散列函数。良好的散列函数让数组中的值呈均匀分布,糟糕的散列函数让值扎堆,导致大量的冲突。
第六章:广度优先搜索 解决最短路径问题的算法被称为广度优先搜索。广度优先搜索是一种用于图的查找算法。
考虑水经销商的问题!
广度优先算法可解决两类问题:
从A节点出发,可以到达B节点吗?
从A节点出发,前往节点B的那条路径最短?
广度优先搜索不仅查找从A到B的路径,而且找到的是最短的路径。
应用广度优先时应该用队列将每一个一级节点的子节点存入队列中。并且已经遍历过的节点不能再次遍历,这样会无限循环下去。
广度优先搜索的运行时间为O(人数 + 边数),这通常写作O(V + E),其中V为顶点(vertice)数,E为边数。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 graph = {} graph["you" ] = ["alice" , "bob" , "claire" ] graph["bob" ] = ["anuj" , "peggy" ] graph["alice" ] = ["peggy" ] graph["claire" ] = ["thom" , "jonny" ] graph["anuj" ] = [] graph["peggy" ] = [] graph["thom" ] = [] graph["jonny" ] = [] from collections import dequedef person_is_seller (name ): return name[-1 ] == 'm' def bfs_search (graph ): searched = [] search_queue = deque() search_queue += graph['you' ] while search_queue: name = search_queue.popleft() if name not in searched: if person_is_seller(name): print(name) return else : search_queue += graph[name]
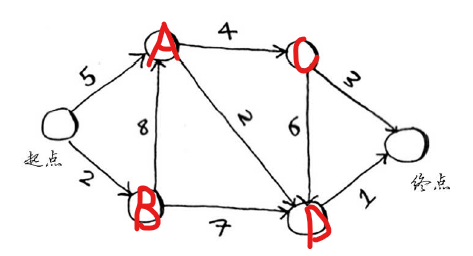
第七章:狄克斯特拉算法 狄克斯特拉算法包含4个步骤:
找出“最便宜”的节点,即可在最短时间内到达的节点。
更新该节点的邻居的开销,其含义将稍后介绍。
重复这个过程,直到对图中的每个节点都这样做了。
计算最终路径。
要计算非加权图中的最短路径,可使用广度优先搜索。要计算加权图中的最短路径,可使用狄克斯特拉算法。
狄克斯特拉算法只适用于有向无环图(directed acyclic graph,DAG)。
换钢琴实例
如果有负权边 ,就不能使用狄克斯特拉算法!原因: 对于处理过的海报节点,没有前往该节点的更短路径。这种假设仅在没有负权边时才成立。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 import mathgraph = dict() graph['start' ] = {} graph['start' ]['a' ] = 5 graph['start' ]['b' ] = 2 graph['a' ] = {} graph['a' ]['c' ] = 4 graph['a' ]['d' ] = 2 graph['b' ] = {} graph['b' ]['a' ] = 8 graph['b' ]['d' ] = 7 graph['c' ] = {} graph['c' ]['d' ] = 6 graph['c' ]['finish' ] = 3 graph['d' ] = {} graph['d' ]['finish' ] = 1 graph['finish' ] = {} cost = dict() cost['a' ] = 5 cost['b' ] = 2 cost['c' ] = math.inf cost['d' ] = math.inf cost['finish' ] = math.inf father = dict() father['a' ] = 'start' father['b' ] = 'start' father['c' ] = None father['d' ] = None father['finish' ] = None def dijk (graph, cost, father ): processed = [] while len(processed) < len(cost.keys()): node_cost = math.inf node = 'finish' for key, value in cost.items(): if key not in processed: if value < node_cost: node_cost = value node = key processed.append(node) for key, value in graph[node].items(): if value+node_cost < cost[key]: cost[key] = value + node_cost father[key] = node temp = 'finish' path = 'finish' while temp != 'start' : temp = father[temp] path = temp + '->' + path print('路径:' , path) return cost['finish' ] if __name__ == '__main__' : print('最短距离:' , dijk(graph, cost, father)) 路径: start->a->d->finish 最短距离: 8
第八章:贪婪算法 贪婪算法很简单:每步都采取最优的做法!每步都选择局部最优解,最终得到的就是全局最优解。
评判近似算法的标准:
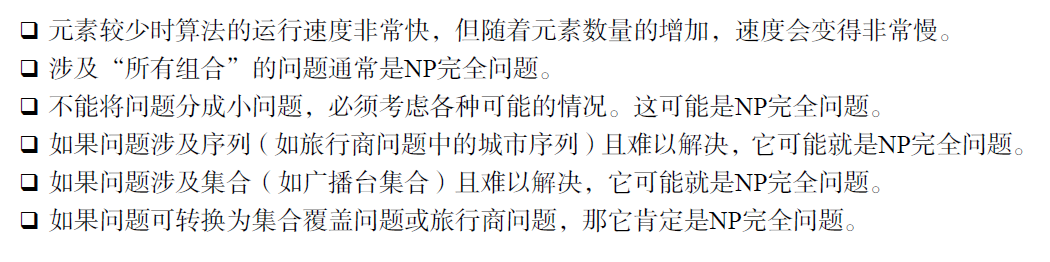
集合覆盖问题~NP完全问题
面对NP完全问题,无法找到最优解,所以采用近似算法。
贪婪算法就是一种简单的近似算法。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 states_needed = {"mt" , "wa" , "or" , "id" , "nv" , "ut" , "ca" , "az" } stations = dict() stations["kone" ] = {"id" , "nv" , "ut" } stations["ktwo" ] = {"wa" , "id" , "mt" } stations["kthree" ] = {"or" , "nv" , "ca" } stations["kfour" ] = {"nv" , "ut" } stations["kfive" ] = {"ca" , "az" } def station_schedule (states_need, stations ): covered = set() greedy = None chosen = set() while covered != states_needed: covered_num = 0 for key, value in stations.items(): if len(value-(value & covered)) > covered_num: covered_num = len(value-(value & covered)) greedy = key covered = covered | stations[greedy] - (stations[greedy] & covered) chosen.add(greedy) del stations[greedy] return chosen if __name__ == '__main__' : print(station_schedule(states_needed, stations)) {'kone' , 'kfive' , 'ktwo' , 'kthree' }
第九章:动态规划 动态规划先解决子问题,再逐步解决大问题。
首先分析背包问题:
余下了空间时,你可根据这些子问题 的答案来确定余下的空间可装入哪些商品。
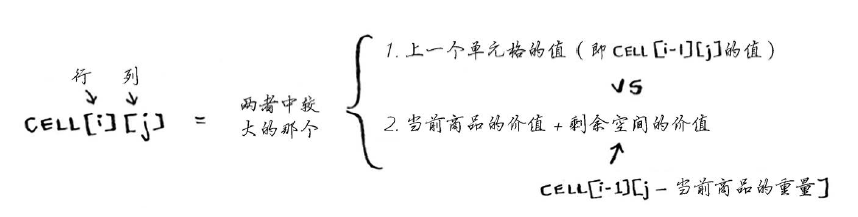
动态规划基本公式!!!
接下来分析旅游行程最优化问题
动态规划功能强大,它能够解决子问题并使用这些答案来解决大问题。但仅当每个子问题都是离散的,即不依赖于其他子问题时,动态规划才管用。
动态规划启示 :
动态规划可帮助你在给定约束条件下找到最优解。在背包问题中,你必须在背包容量给定的情况下,偷到价值最高的商品。
在问题可分解为彼此独立且离散的子问题时,就可使用动态规划来解决。要设计出动态规划解决方案可能很难,这正是本节要介绍的。下面是一些通用的小贴士。
每种动态规划解决方案都涉及网格。
单元格中的值通常就是你要优化的值。在前面的背包问题中,单元格的值为商品的价值。
每个单元格都是一个子问题,因此你应考虑如何将问题分成子问题,这有助于你找出网格的坐标轴。
本书一共11章,第10章粗浅介绍了机器学习,第11章介绍了以后的学习方向,这里就不做笔记了。
最后附上本书PDF链接,有兴趣的同学可以自取:
点击下载pdf文件